Autonomous Path Planning — Scratch-built Autopilot
End-to-end autonomous path planning implementation on a custom-built autopilot stack
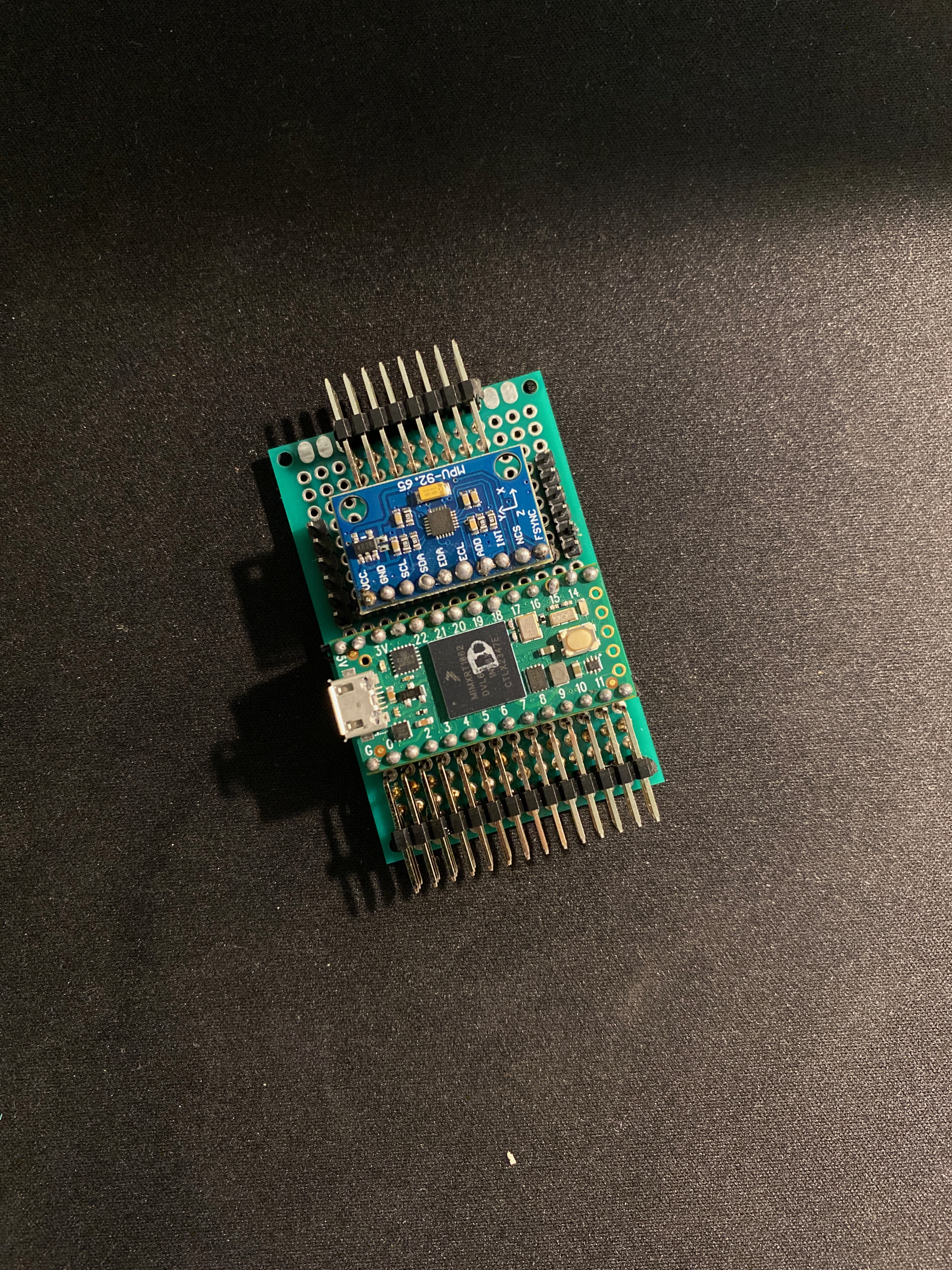
Designed and implemented autonomous path planning on a scratch-built autopilot platform, integrating guidance logic, state estimation, and onboard compute for closed-loop autonomous navigation.
Full technical details in the report above.